- エコシステム
- クイック ファインダー

コンピュータベースのビジョンは、先進運転支援システム (ADAS)や医療画像、精密農法、小売り、広告、メディア、セキュリティーと監視、無人航空機(UAV)、ロボティクスなど多様なアプリケーションに変革をもたらす可能性のある急成長市場です。新しいAIベースのアプリケーションにおけるコンピュータビジョンシステムへの需要の高まりは、こうした急成長の大きな要因となっています。現在、AIはコンピュータビジョン市場において47% 以上という驚異的な複合年間成長率(CAGR)を達成すると見込まれていますが、マシンビジョン市場全体としては、『わずか』8.5%i ほどのCAGRが予想されています。Researchstore.bizii によると、この高成長の背景となっている最大の要因は、品質管理や自動化に対する需要の増加や、視覚制御ロボットシステムの発展、マシンビジョン向け3Dシステム採用の増加、および自動画像取得に加え、特定の分析や処理機能が求められるアプリケーション単位の画像処理システムに対する需要の増大が挙げられます。
エッジ
- 低アップリンクスピード
- スケーラブルなパフォーマンスのCPU群
- 低遅延のAI推論(ローカル処理)
- 低コストの処理
- ローカル操作(ネットワーク接続なし)
クラウド
- インフラに応じた高速アップリング
- CPU 速度に対する要求はエッジより低い
- AI 推論の遅延はアップリンクに依存
- ネットワーク接続が必須

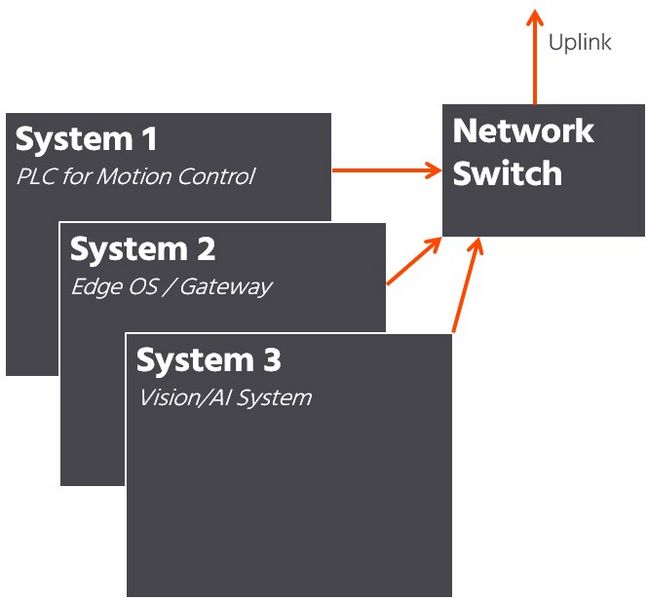
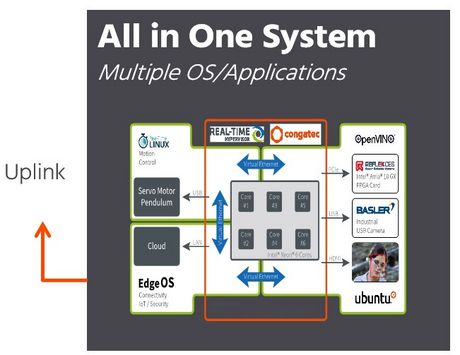

リアルタイムロボット用、組込みビジョン・コンピューティング:
Congatecによりデザインされた デモシステムは、Intel® 、 Real-Time Systems (RTS) 両社の協力により、ディープラーニングをベースとする AI アルゴリズムによる状況認識など、マルチタスクの同時並行処理を必要とする次世代のビジョンベース協調型ロボット、自動制御、自律走行車を対象とするものです。
これらに対応するプラットフォームとして、Intel® Xeon® E2プロセッサ を搭載した COM Express Type 6 モジュールをベースに、RTS社の Real-TIme Hypervisor により分離された3 つのCPUパーティション環境にワークロードを統合します。
最初のCPUパーティションでは Basler 社製ビジョンカメラを操作して、Intel® OpenVino® ソフトウェアにより、Linux上で視覚ベースの物体認識を行い、Refexces 社製 Intel® Arria® 10 FPGA カードにおいて AI アルゴリズムを実行します。次のCPUパーティションにはゲートウェイを立ち上げ、安全な IoT 接続を確保します。最後のCPUパーティションでは、リアルタイム Linux を実行し、倒立振子システムのバランスをリアルタイムで制御します。 デモシステムにおいて、倒立振子のバランスを崩す試みを行っても、システムが瞬時に反応し、リアルタイムで倒立振子のバランスを維持します。
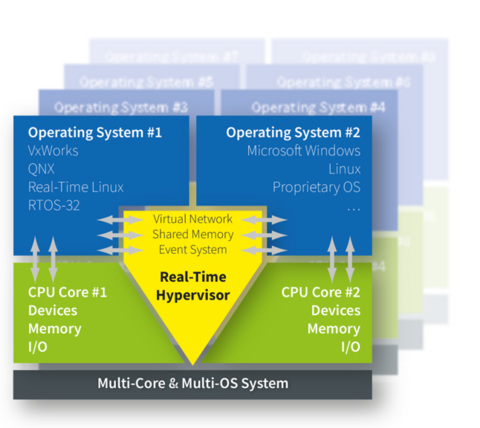
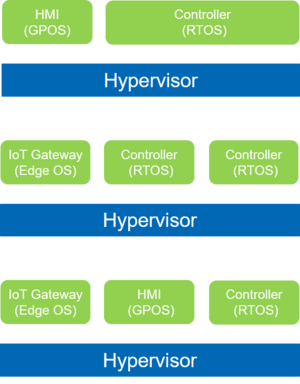
複数のオペレーティングシステムを起動
- CPUコア (グループ構成含む) に分離したパーティションごとにOSを分離
x86 CPU をすべてサポート
- Intel VT-x, AMD-V VIA VT 仮想化支援機能を利用
- マルチコア(HT含む)プロセッサが対象
遅延時間は 0 μsec
- RTOSは仮想化機能を介さず CPU コアに直接アクセス
OS間通信
- 仮想ネットワーク
- 共有メモリ
- イベントシステム
パーティションに対するリソース割当て
- DRAM、デバイス、各種インターフェースなどの物理リソースは、一つの OS のみに割当て
- 物理リソースが割当てられた以外の OSから は、物理リソースのアクセスは不可
- ディスクコントローラなど一部の物理リソースは、複数OSより仮想化機能により共有可能