Hardware Consolidation Example

Computer-based vision is a rapidly growing market with the potential to revolutionize applications as diverse as advanced driver assistance systems, medical imaging, precision farming, retail, advertising, media, security and surveillance, unmanned aerial vehicles (UAVs), and robotics. The rising demand for computer vision systems in new AI-based applications is one of the main driving factors. AI is currently expected to achieve a staggering CAGR of +47% in the computer vision market, whereas the overall machine vision market is forecast to grow ‘only’ around 8.5%. According to Researchstore.biz, the biggest drivers behind this growth are an increasing demand for quality control and automation, the evolution of vision-controlled robot systems, the growing adoption of 3D systems for machine vision, as well as the rising demand for application-specific image processing systems that are required to offer specific analysis and processing functions in addition to automatic image acquisition.
Advantages of hardware consolidation for edge computing
Edge vs. Cloud Computing
Edge
- Less demand for uplink speed
- Scalable performance CPUs
- Low AI inference latency (local processing)
- Less transaction cost
- Local operation with no network possible
Cloud
- High speed uplink required depending on public infrastructure
- Less edge CPU speed required
- AI inference latency depending on cloud link performance
- No operation without network
AI vision platform for robotics
Computer-based vision is growing more and more important in robotic systems. But how do you fuse hard real-time applications and time-sensitive networking (TSN) with vision systems and artificial intelligence (AI)?

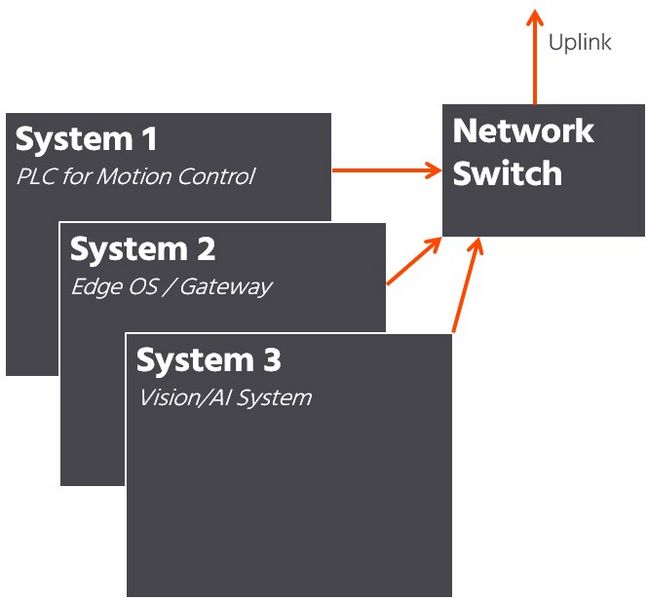
What is Hardware Consolidation?
Traditional
Consolidated
Why Hardware Consolidation?
Cost
one multicore system causes less investment and maintenance cost
Reliability
less cables, less complex hardware systems
Maintenance
single system instead of multiple specialized boxes
Security
integrated firewall cannot be passed
Scalable
all kinds of applications / OS on one system
Latency
AI analytics often demands fast local reactions
Cloud:
- Transmit (huge) data to cloud (can be slow)
- Execute AI algorithms in the cloud (fast)
- Each step adds latency
- No real-time processing
- Transmit processed data/results to the edge (speed depends on data volume)
Edge:
- Fast local execution of AI algorithms
- Allows for extreme fast real-time reactions even capable for industrial motion control
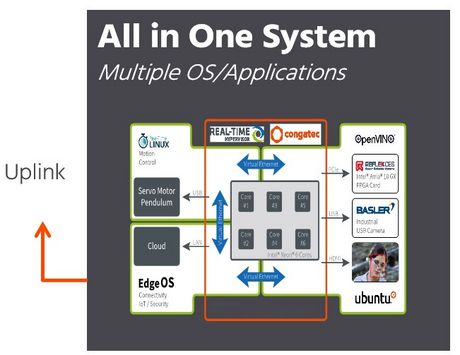
Workload Consolidation with Real-Time Control, Vision/AI and Edge OS

Embedded vision computing for real-time robotics:
The demo system congatec designed in cooperation with Intel® and Real-Time Systems targets the next generation of vision based collaborative robotics, automation controls and autonomous vehicles that have to tackle multiple tasks in parallel, including situational awareness utilizing deep learning based AI algorithms. The solution ready platform is based on a COM Express Type 6 module equipped with Intel® Xeon® E2 processor and integrates three preconfigured virtual machines. One operates a Basler vision camera, where the vision based object recognition runs on Linux via the Intel® OpenVino® software, and the AI algorithms are executed on an Intel® Arria® 10 FPGA card from Refexces. Another partition hosts a gateway for secure IoT connectivity. The independent real-time partition runs real-time Linux to control the balance of an inverted pendulum in real-time. Visitors can try to disturb the balance of the pendulums – the system will react instantly and with real-time behavior to keep the pendulums in balance.
Typical Requirements
New technologies to be added to existing applications
Many known applications will take advantage of new technologies which are available today.
Vision
► Connect cameras for application, security and safety reasons
► It’s easier to add a dedicated OS with the vision application and connect it to the main application by (virtual) Ethernet
AI
► Many application software packages are available of the shelf (i.e. OpenVino from Intel).
This can be connected to the application data or to the vision application
► Easy to keep it separated on own Hypervisor instance.
IoT
► Connectivity always requires high data security. This can be done easily by a dedicated small and hardened OS.
This hypervised “gate keeper” is the owner of the physical Ethernet. All other instances are connected internally.
► All kinds of connectivity methods can be applied
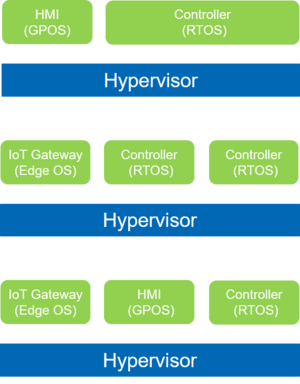
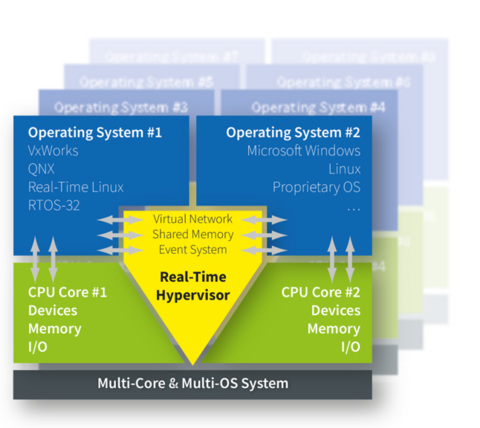
Real-Time Hypervisor
Boots up multiple Operating Systems
- Max. 1 OS per CPU Core
Supports all current x86 CPUs
Adds 0µs Latency
Internal Communication
- Virtual Network
- Shared Memory
- Event Systems
Partitions Resources
- Resources like DRAM, devices and interfaces are dedicated to single OSes
- The other OS can not access or even see the resources from the other OSes
Endless Possibilities
Multi-Core lends itself to workload consolidation:
- To reduce cost, size and power consumption, real-time applications may benefit from a GPOS like Windows or Linux executing in parallel on one or multiple CPUs.
- Running a gateway directly on board, makes each controller capable of being an “edge device”
- If real-time applications can execute on a hypervisor in hard real-time, different guest operating systems can be combined allowing for a building block approach.